Mål: Att kunna styra positionen på en servo genom att böja en flex sensor.
Teori: Flex sensorn har två ben och motståndet mellan benen är t.ex. 22,5kohmΩ. Motståndet ändras då man böjer sensorn. Denna förändring i motstånd kan man läsa med hjälp av en spänningsdelare. Motsvarande koppling har du gjort tidigare med bl.a. en thermistor, ldr, och potentiometer.
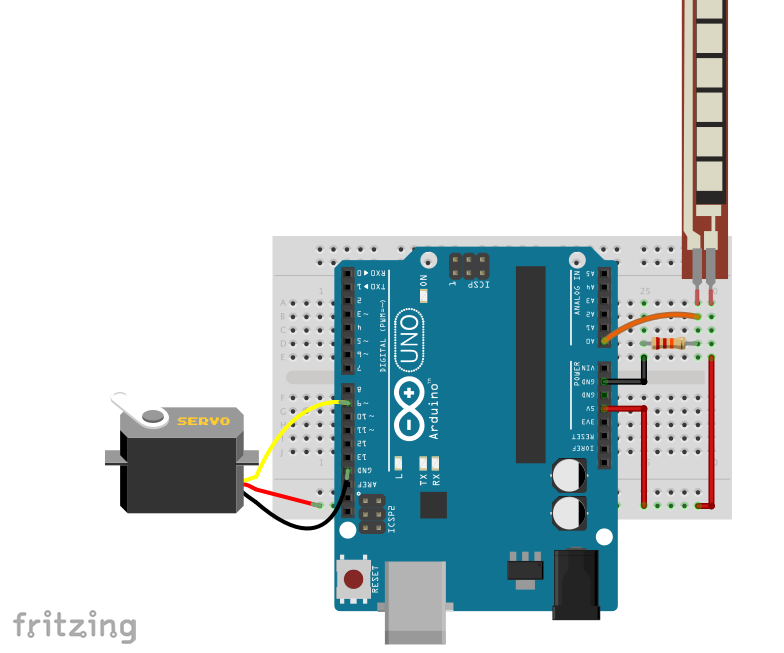
Koppling: Enligt bilden. Observera att motsåndet är 22kΩ nästan samma som flex sensorn. Böj flex sensorn endast på det angivna området och aldrig för mycket.
Fritzing kopplingsschema
Arduino koden
// inkludera servo biblioteket #include <Servo.h> // skapa och namnge ett servo objekt Servo minServo; void setup() { // starta serial kommunikationen Serial.begin(9600); // koppla din servo på pin9 till servo objektet minServo.attach(9); } void loop() { // läs analogpin A0 och spara värdet i variabeln flexValue int flexValue = analogRead(A0); // skriv ut värdet i serial monitorn Serial.println(flexValue); // skala om sensorns värden till intervallet 0-180 grader int mappedValue = map(flexValue, 320, 520, 0, 180); // vrid servon minServo.write(mappedValue); // vänta 2ms för att inte överbelasta processorn delay(2); }
