Mål: Att avläsa den infraröda avståndssensorn.
Teori: Sensorn känner av rörelse på ett bestämt (justerbart 0 – 80cm) avstånd. Om sensorn är ställd exempelvis på 50cm kommer signalkabeln att gå från HIGH till LOW om avståndet från sensorn till ett objekt är ca 50cm. Sensorn används bland annat i robotar där man vill undvika kollision med vägg.
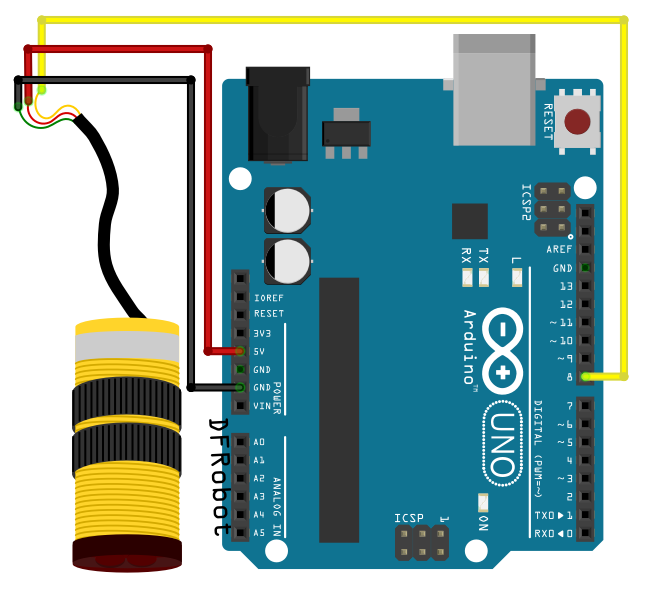
Fritzing kopplingsschema
Arduino koden
void setup() { Serial.begin(9600); } void loop() { int state = digitalRead(8); Serial.println(state); delay(20); }
