


När vi rör på vår hand så ska handen göra samma rörelse.
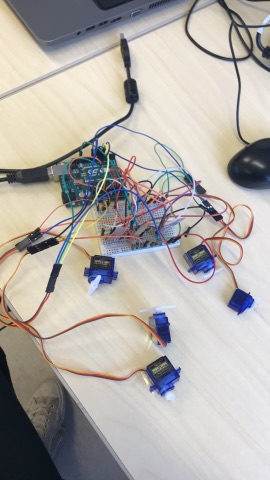
vi har fått handen att funka och den är trådlöst.








——————- 2018 handen transmitter with flex sensors —————–
/* YourDuinoStarter Example: nRF24L01 Radio Remote control: Joystick to Servos - WHAT IT DOES Joystick on this Arduino communicates by nRF25L01 Radio to a second Arduino with an nRF24L01 radio and 2 pan-tilt servos SEE: The variable 'hasHardware'. You can test without Joystick and later set hasHardware = true; - SEE the comments after "//" on each line below - CONNECTIONS: - nRF24L01 Radio Module: See http://arduino-info.wikispaces.com/Nrf24L01-2.4GHz-HowTo 1 - GND 2 - VCC 3.3V !!! NOT 5V 3 - CE to Arduino pin 7 4 - CSN to Arduino pin 8 5 - SCK to Arduino pin 13 6 - MOSI to Arduino pin 11 7 - MISO to Arduino pin 12 8 - UNUSED - V2.12 02/08/2016 - Uses the RF24 Library by TMRH20 and Maniacbug: https://github.com/TMRh20/RF24 (Download ZIP) Questions: terry@yourduino.com */ /*-----( Import needed libraries )-----*/ #include <SPI.h> // Comes with Arduino IDE #include "RF24.h" // Download and Install (See above) #include "printf.h" // Needed for "printDetails" Takes up some memory /*-----( Declare Constants and Pin Numbers )-----*/ #define CE_PIN 7 // The pins to be used for CE and SN #define CSN_PIN 8 #define pekfinger A1 // The Joystick potentiometers connected to Arduino Analog inputs #define mittenfinger A2 #define ringfinger A3 // The Joystick push-down switch, will be used as a Digital input #define lillfinger A4 /*-----( Declare objects )-----*/ /* Hardware configuration: Set up nRF24L01 radio on SPI bus plus (usually) pins 7 & 8 (Can be changed) */ RF24 radio(CE_PIN, CSN_PIN); /*-----( Declare Variables )-----*/ byte addresses[][6] = {"1Node", "2Node"}; // These will be the names of the "Pipes" unsigned long timeNow; // Used to grab the current time, calculate delays unsigned long started_waiting_at; boolean timeout; // Timeout? True or False // Allows testing of radios and code without Joystick hardware. Set 'true' when joystick connected //boolean hasHardware = false; boolean hasHardware = true; /** Create a data structure for transmitting and receiving data This allows many variables to be easily sent and received in a single transmission See http://www.cplusplus.com/doc/tutorial/structures/ */ struct dataStruct { unsigned long _micros; // to save response times int flexValue1; // The Joystick position values int flexValue2; int flexValue3; int flexValue4; } myData; // This can be accessed in the form: myData.Xposition etc. void setup() /****** SETUP: RUNS ONCE ******/ { Serial.begin(115200); // MUST reset the Serial Monitor to 115200 (lower right of window ) // NOTE: The "F" in the print statements means "unchangable data; save in Flash Memory to conserve SRAM" Serial.println(F("YourDuino.com Example: Send joystick data by nRF24L01 radio to another Arduino")); printf_begin(); // Needed for "printDetails" Takes up some memory //pinMode(JOYSTICK_SW, INPUT_PULLUP); // Pin A2 will be used as a digital input radio.begin(); // Initialize the nRF24L01 Radio radio.setChannel(108); // Above most WiFi frequencies radio.setDataRate(RF24_250KBPS); // Fast enough.. Better range // Set the Power Amplifier Level low to prevent power supply related issues since this is a // getting_started sketch, and the likelihood of close proximity of the devices. RF24_PA_MAX is default. // PALevelcan be one of four levels: RF24_PA_MIN, RF24_PA_LOW, RF24_PA_HIGH and RF24_PA_MAX radio.setPALevel(RF24_PA_LOW); // radio.setPALevel(RF24_PA_MAX); // Open a writing and reading pipe on each radio, with opposite addresses radio.openWritingPipe(addresses[0]); radio.openReadingPipe(1, addresses[1]); // Start the radio listening for data radio.startListening(); // radio.printDetails(); //Uncomment to show LOTS of debugging information }//--(end setup )--- void loop() /****** LOOP: RUNS CONSTANTLY ******/ { radio.stopListening(); // First, stop listening so we can talk. if (hasHardware) // Set in variables at top { /*********************( Read the Joystick positions )*************************/ myData.flexValue1 = analogRead(A1); myData.flexValue2 = analogRead(A2); myData.flexValue3 = analogRead(A3); myData.flexValue4 = analogRead(A4); } else { myData.flexValue1 = 100; // Send some known fake data myData.flexValue2 = 100; myData.flexValue3 = 100; myData.flexValue4 = 100; } myData._micros = micros(); // Send back for timing Serial.print(F("Now sending - ")); if (!radio.write( &myData, sizeof(myData) )) { // Send data, checking for error ("!" means NOT) Serial.println(F("Transmit failed ")); } radio.startListening(); // Now, continue listening started_waiting_at = micros(); // timeout period, get the current microseconds timeout = false; // variable to indicate if a response was received or not while ( ! radio.available() ) { // While nothing is received if (micros() - started_waiting_at > 200000 ) { // If waited longer than 200ms, indicate timeout and exit while loop timeout = true; break; } } if ( timeout ) { // Describe the results Serial.println(F("Response timed out - no Acknowledge.")); } else { // Grab the response, compare, and send to Serial Monitor radio.read( &myData, sizeof(myData) ); timeNow = micros(); // Show it Serial.print(F("Sent ")); Serial.print(timeNow); Serial.print(F(", Got response ")); Serial.print(myData._micros); Serial.print(F(", Round-trip delay ")); Serial.print(timeNow - myData._micros); Serial.println(F(" microseconds ")); } // Send again after delay. When working OK, change to something like 100 delay(100); }//--(end main loop )--- /*-----( Declare User-written Functions )-----*/ // NONE YET //*********( THE END )***********
————2018 Handen Receiver with servos ——
/* YourDuinoStarter Example: nRF24L01 Radio remote control of servos by joystick - WHAT IT DOES Joystick on other Arduino communicates by nRF25L01 Radio to this Arduino with 2 pan-tilt servos SEE: The variable 'hasHardware'. You can test without servos and later set hasHardware = true; You NEED separate Servo power, not USB. YourDuino RoboRED has built in 2A power for servos - SEE the comments after "//" on each line below - CONNECTIONS: - nRF24L01 Radio Module: See http://arduino-info.wikispaces.com/Nrf24L01-2.4GHz-HowTo 1 - GND 2 - VCC 3.3V !!! NOT 5V 3 - CE to Arduino pin 7 4 - CSN to Arduino pin 8 5 - SCK to Arduino pin 13 6 - MOSI to Arduino pin 11 7 - MISO to Arduino pin 12 8 - UNUSED - V2.12 02/08/2016 - Uses the RF24 Library by TMRH20 and Maniacbug: https://github.com/TMRh20/RF24 (Download ZIP) Questions: terry@yourduino.com */ /*-----( Import needed libraries )-----*/ #include <SPI.h> // Comes with Arduino IDE #include "RF24.h" // Download and Install (See above) #include "printf.h" // Needed for "printDetails" Takes up some memory // NEED the SoftwareServo library installed // http://playground.arduino.cc/uploads/ComponentLib/SoftwareServo.zip #include <SoftwareServo.h> // Regular Servo library creates timer conflict! /*-----( Declare Constants and Pin Numbers )-----*/ #define CE_PIN 7 // The pins to be used for CE and SN #define CSN_PIN 8 //#define ServoHorizontalPIN 3 //Pin Numbers for servos and laser/LED //#define ServoVerticalPIN 5 //#define LaserPIN 6 #define ServoMIN_H 10 // Don't go to very end of servo travel #define ServoMAX_H 170 // which may not be all the way from 0 to 180. #define ServoMIN_V 10 // Don't go to very end of servo travel #define ServoMAX_V 170 // which may not be all the way from 0 to 180 /*-----( Declare objects )-----*/ /* Hardware configuration: Set up nRF24L01 radio on SPI bus plus (usually) pins 7 & 8 (Can be changed) */ RF24 radio(CE_PIN, CSN_PIN); SoftwareServo pekServo; SoftwareServo mittenServo; SoftwareServo ringServo; SoftwareServo lillServo; /*-----( Declare Variables )-----*/ byte addresses[][6] = {"1Node", "2Node"}; // These will be the names of the "Pipes" // Allows testing of radios and code without servo hardware. Set 'true' when servos connected //boolean hasHardware = false; // Allows testing of radios and code without Joystick hardware. boolean hasHardware = true; int flexValue1Received; // Variable to store received Joystick values int flexValue2Received; int flexValue3Received; int flexValue4Received; int pekServoPosition; // variable to store the servo position int mittenServoPosition; int ringServoPosition; int lillServoPosition; /** Create a data structure for transmitting and receiving data This allows many variables to be easily sent and received in a single transmission See http://www.cplusplus.com/doc/tutorial/structures/ */ struct dataStruct { unsigned long _micros; // to save response times int flexValue1; // The Joystick position values int flexValue2; int flexValue3; int flexValue4; } myData; // This can be accessed in the form: myData.Xposition etc. void setup() /****** SETUP: RUNS ONCE ******/ { Serial.begin(115200); // MUST reset the Serial Monitor to 115200 (lower right of window ) // NOTE: The "F" in the print statements means "unchangable data; save in Flash Memory to conserve SRAM" Serial.println(F("YourDuino.com Example: Receive joystick data by nRF24L01 radio from another Arduino")); Serial.println(F("and control servos if attached (Check 'hasHardware' variable")); printf_begin(); // Needed for "printDetails" Takes up some memory /*-----( Set up servos )-----*/ if (hasHardware) { pekServo.attach(5); // attaches the servo to the servo object mittenServo.attach(3); ringServo.attach(10); lillServo.attach(9); } radio.begin(); // Initialize the nRF24L01 Radio radio.setChannel(108); // 2.508 Ghz - Above most Wifi Channels radio.setDataRate(RF24_250KBPS); // Fast enough.. Better range // Set the Power Amplifier Level low to prevent power supply related issues since this is a // getting_started sketch, and the likelihood of close proximity of the devices. RF24_PA_MAX is default. // PALevelcan be one of four levels: RF24_PA_MIN, RF24_PA_LOW, RF24_PA_HIGH and RF24_PA_MAX radio.setPALevel(RF24_PA_LOW); // radio.setPALevel(RF24_PA_MAX); // Open a writing and reading pipe on each radio, with opposite addresses radio.openWritingPipe(addresses[1]); radio.openReadingPipe(1, addresses[0]); // Start the radio listening for data radio.startListening(); // radio.printDetails(); //Uncomment to show LOTS of debugging information }//--(end setup )--- void loop() /****** LOOP: RUNS CONSTANTLY ******/ { if ( radio.available()) { while (radio.available()) // While there is data ready to be retrieved from the receive pipe { radio.read( &myData, sizeof(myData) ); // Get the data } radio.stopListening(); // First, stop listening so we can transmit radio.write( &myData, sizeof(myData) ); // Send the received data back. radio.startListening(); // Now, resume listening so we catch the next packets. Serial.print(F("Packet Received - Sent response ")); // Print the received packet data Serial.print(myData._micros); Serial.print(F("uS flex1 = ")); Serial.print(myData.flexValue1); Serial.print(F(" flex2 = ")); Serial.print(myData.flexValue2); Serial.print(F(" flex3 = ")); Serial.print(myData.flexValue3); Serial.print(F(" flex4 = ")); Serial.println(myData.flexValue4); } // END radio available if (hasHardware) { /*-----( Calculate servo position values, send to the servos )-----*/ SoftwareServo::refresh();//refreshes servo to keep them updating flexValue1Received = myData.flexValue1; // Get the values received flexValue2Received = myData.flexValue2; flexValue3Received = myData.flexValue3; flexValue4Received = myData.flexValue4; // scale it to use it with the servo (value between MIN and MAX) pekServoPosition = map(flexValue1Received, 587, 300, ServoMIN_H , ServoMAX_H); mittenServoPosition = map(flexValue2Received, 580, 380, ServoMIN_H , ServoMAX_H); ringServoPosition = map(flexValue3Received, 560, 430, ServoMIN_H , ServoMAX_H); lillServoPosition = map(flexValue4Received, 600, 460, ServoMIN_H , ServoMAX_H); // tell servos to go to position pekServo.write(pekServoPosition); mittenServo.write(mittenServoPosition); ringServo.write(ringServoPosition); lillServo.write(lillServoPosition); } // END hasHardware }//--(end main loop )--- /*-----( Declare User-written Functions )-----*/ // NONE YET //*********( THE END )***********
————
